Seznam manipulátorů:
Fanuc CR-35iA - kolaborativní robot s nosností 35 kg.
Fanuc CRx 10iA/L - kolaborativní robot s nosností 10 kg a dosahem 1400 mm
Fanuc M20id/25 - nekolaborativní manipulátor sloužící k zakládání do CMM měřícího pracoviště
ABB IRB-1200-7/0.7- nekolaborativní manipulátor s nosností 7 kg a dosahem 700 mm
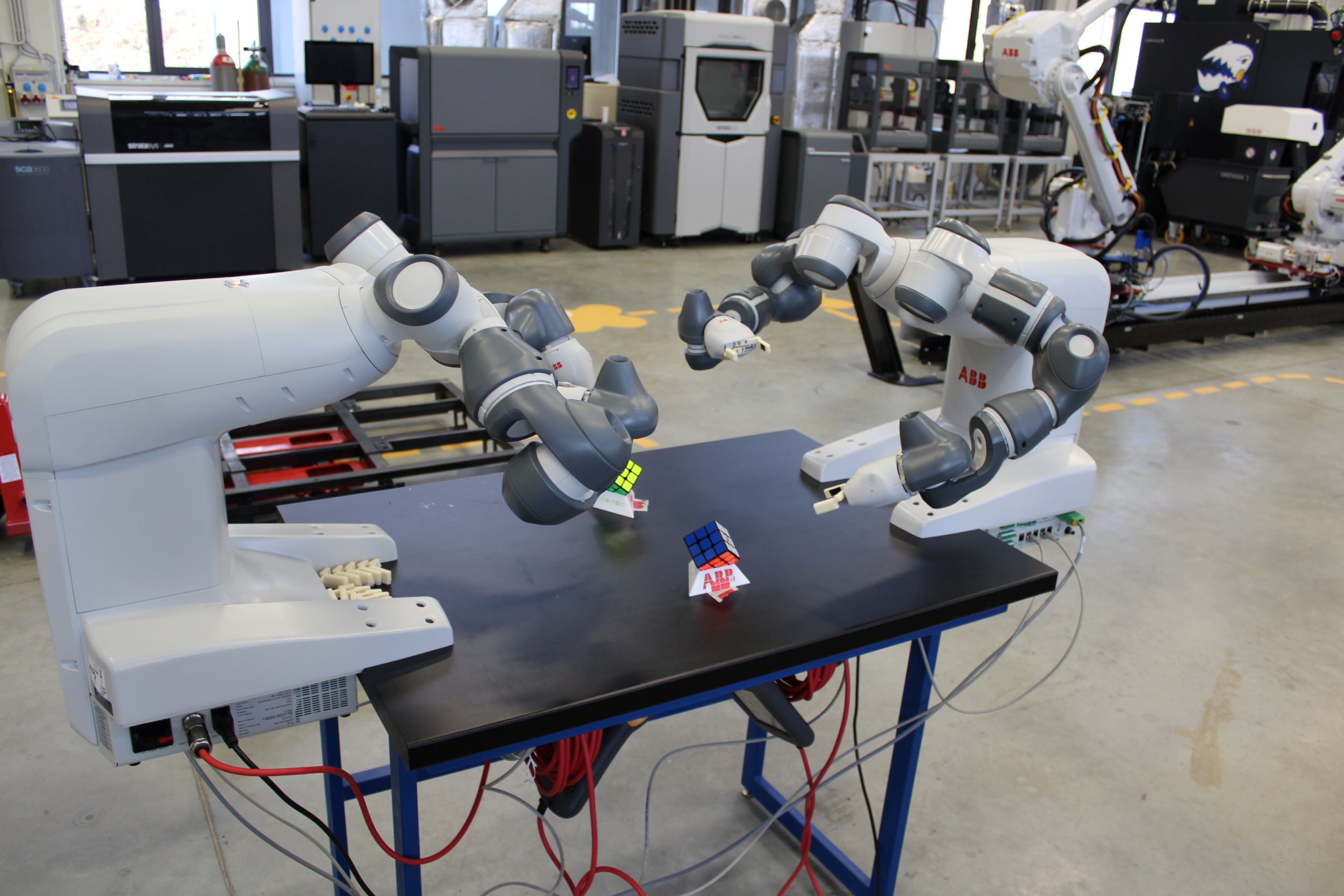
ABB YuMi (2x) - kolaborativní robot se dvěma 7-mi osými rameny
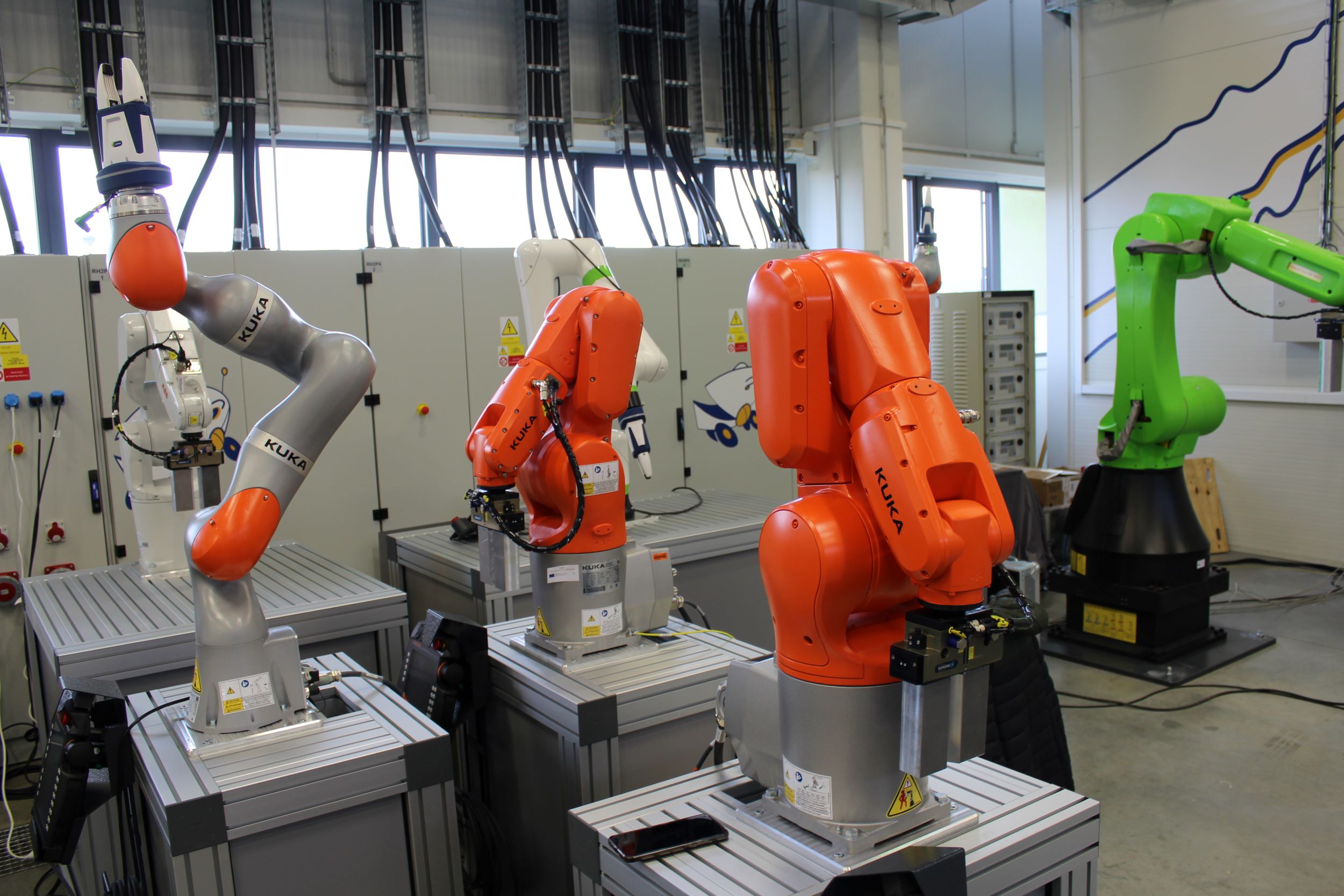
KUKA LBR iiwa 7 R800 (2x) - kolaborativní robot s nosností 7 kg. Vyznačuje se především 7-mi klouby místo standartních 6-ti.
KUKA KR6 R700-2 (2x) - nekolaborativní manipulátor s nosností 6,8 kg.


 pr@ceitec.vutbr.cz
pr@ceitec.vutbr.cz